Procesamiento de datos

PROCESAMIENTO DE LOS DATOS
El tratamiento de los datos en el proyecto PNOA–LiDAR se organiza en una serie de fases consecutivas, desde la adquisición hasta la generación de productos finales.Un sistema LiDAR está compuesto, principalmente, por:
- Plataforma (avión, UAV, vehículo terrestre, trípode, mochila, embarcación, etc.)
- Escáner láser y cámara fotogramétrica.
- Sistema GNSS (posicionamiento global).
- Sistema INS (navegación inercial: rotación, inclinación y rumbo).
-
1 Toma de datos:
Generación de la nube de puntos en bruto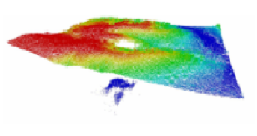
-
2 Control de calidad. Verificación del vuelo y de la
nube de puntos obtenida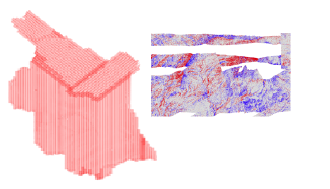
-
3 Cambio de datum de coordenadas
elipsoidales a ortométricas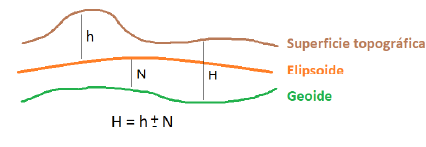
-
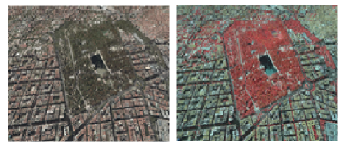
4 Asignación de color:
Integración de información radiométrica:- - Color verdadero (RGB)
- - Infrarrojo (IRRG)
-
5 Clasificación automática y mejora
- - Identificación de elementos mediantealgoritmos automáticos, IA y edición posterior
-
6 Compresión y distribución
Conversión a formato LAZ y publicación de los datos.
-
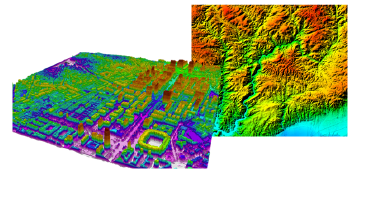
7 Obtención de productos derivados
- - Creación de modelos digitales y capas temáticas
CLASIFICACIÓN DE LA NUBE DE PUNTOS
La incorporación de técnicas de inteligencia artificial ha permitido aumentar, significativamente, el número de clases identificables. Actualmente se dispone de 3 niveles de nubes de puntos clasificadas (NPC).
En el nivel más avanzado (NPC03), es posible distinguir más de 20 tipos de fenómenos geográficos, con:
- Fiabilidad superior al 90 % en 13 clases básicas (NPC02)
- Fiabilidad superior al 70 % en clases adicionales
Además, se publica de forma temprana una versión provisional (NPC01), clasificada automáticamente en 5 clases, con una fiabilidad aproximada del 90 %.
Todos los productos NPC cuentan con especificaciones técnicas detalladas, que incluyen:
- Definición de clases
- Precisiones
- Metodología de validación
Estas mejoras permiten dar respuesta a nuevas demandas y ampliar los usos de la nube de puntos clasificada.
Los niveles de procesamiento son los siguientes:
-
NPC01 Clasificación automática inicial
- Formato nombre: PNOA_2024_MAD _XXX-YYYY_ NPC01.LAZ
- Objetivo: Obtener una clasificación provisional rápida como base para el procesado posterior.
- Método: clasificación automática basada en características geométricas con posible apoyo en información radiométrica u otras fuentes de información externas.
- Clases: Suelo (2), vegetación (3-5), edificios (6)y solape (12), sin clasificar (1) y ruido (7).
- Precisión: F-Score global ≥ 0.9 Se utilizarán zonas de chequeo para verificar los resultados.
-
NPC02 Nube de puntos clasificada edición básica
- Formato nombre: PNOA_2024_AST_XXX-YYYY_ NPC02.LAZ
- Objetivo: Obtener la nube de puntos clasificada en las clases básicas.
- Método: Clasificación o segmentación semántica de nubes de puntos LiDAR que permita obtener las precisiones establecidas, pudiéndose apoyar en fuentes externas (ortoimágenes, cartografía previa existente, coberturas LiDAR anteriores, modelos DL pre entrenados, técnicas de teledetección aplicadas a la intensidad de retorno de cada pulso láser y/o a las imágenes multiespectrales capturadas simultáneamente, etc.), con edición interactiva en caso de ser necesario.
- Clases: Suelo (2), vegetación (3-5), edificios (6), puentes (17), solape (12), Agua (9), vehículos (64), Torres eléctricas (15), cables eléctricos (14), aerogeneradores (68), paneles solares (67), Antenas (70). Se emplean las clases 1 y 7 para definir los puntos sin clasificar y ruido respectivamente.
- Precisión: Se establecen las siguientes precisiones F-Score en función del nivel de la clasificación y la clase:
- Clasificación básica: F-Score general >= (0,97/0,96/0,90) en terreno rústico/urbano/montaña (zona rocosa o matorral) respectivamente
- Para la clase Suelo: >=0,97/0,97/0,85 en terreno rústico/urbano/montaña (zona rocosa o matorral) respectivamente
- Para la clase Vegetación: >=0,97/0,90/0,60 en terreno rústico/urbano/montaña (zona rocosa o matorral) respectivamente
- Para la clase Edificaciones: >=0,95/0,90 en terreno rústico/urbano respectivamente
- Puentes: >=0,95
- Agua:>=0,85
- Vehículos: >=0,85
- Torres eléctricas:>=0,85
- Cables eléctricos:>=0,85
- Aerogeneradores:>=0,85
- Paneles solares:>=0,85
- Antenas:>=0,85
-
NPC03 Nube de puntos clasificada edición básica mejorada
- Formato nombre: PNOA_2024_AST_XXX-YYYY_ NPC03.LAZ
- Objetivo: Mejorar la fiabilidad de las clases minoritarios NPC02 a >=0.90 y añadir nuevas clases avanzadas.
- Método: Igual que NPC01 y NPC02, con mayor refinamiento y edición.
- Clases adicionales: Muros (65), Presas (69), Cubierta edificio plana (71), Cubierta edificio plana vegetal (73), cubierta edificio inclinada (72), fachada (74), patio interior (75).
- Precisión: Se establecen las siguientes precisiones F-Score en función del nivel de la clasificación y la clase:
- Para clases Muro y Presas: >=0,85
- Para clases Cubierta edificio plana (71), Cubierta edificio plana vegetal (73), cubierta edificio inclinada (72), fachada (74), patio interior (75): >=0,70
Las especificaciones técnicas se pueden encontrar en el apartado de Especificaciones Técnicas, incluyendo la descripción semántica de cada clase. La codificación de clases se realiza de acuerdo con el estándar establecido por la Sociedad Americana de Fotogrametría y Teledetección (ASPRS) para el formato LAS 1.4

